






Projects Last Projects
Drone package delivery
Gal peretz , Gal malka
Supervised by Ohad Menashe
This is an open source project that intended to help people to create autonomous drone missions that operate with a pixhawk controller.
The project is written in C++ and Python in order to enable fast image processing and operating the drone in real time.
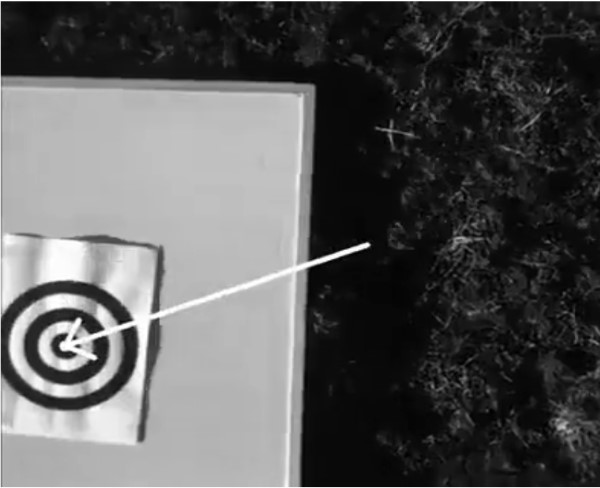
The project also includes built in missions. Our goal was to fly to a specific GPS location, scan the area for a bullseye target and land on the center of the target.
You can use the framework to create your own missions. The framework includes an API that helps to stream live video over wifi or/and record the video to file.
We’ve created this project in the Geomatric Image Processing lab at the Technion. Our goal was to create a simple framework to manage simple and complex missions represented by state machine
Read more in our github page or see the project Report and final presentation
Please, see project report.
Please, see final presentation.
Please, see demo clip.