








Open Fusion - Real-time 3D Surface Reconstruction Out of Depth Images
Nurit Schwabsky and Vered Cohen
Supervised by Aaron Wetzler and Chaim Gotsman
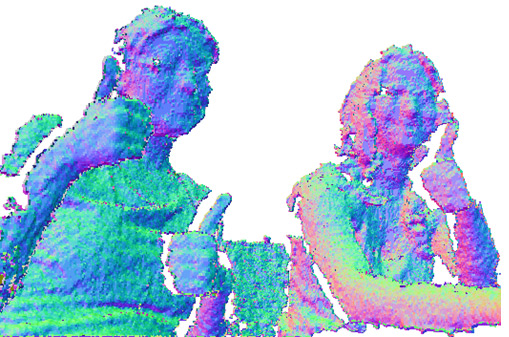
OpenFusion enables the user to build a 3D model of an indoor scene in real-time using the Asus XtionPro Live depth camera. The system receives a constant stream of depth maps from the camera, which it uses to track the 6DOF camera pose and update the model accordingly. Depth data received from the camera is noisy and often full of holes (areas where no depth data is available), thus many different viewpoints are necessary in order to fill in gaps and smooth away noisy signals. As the user moves around the scene, new views of the scanned objects are discovered and integrated, resulting in a complete high-quality model. Though OpenFusion builds a static model, a small amount of dynamic interaction with the scene is possible; over time the system will "fix" the model using the new data received.
Please, see project report.
Please, see final presentation.
Please, see project demo.