








Rigid ICP Registration with Kinnect
Choukroun Yoni and Semmel Elie
Supervised by Dr. Aflalo Yonathan
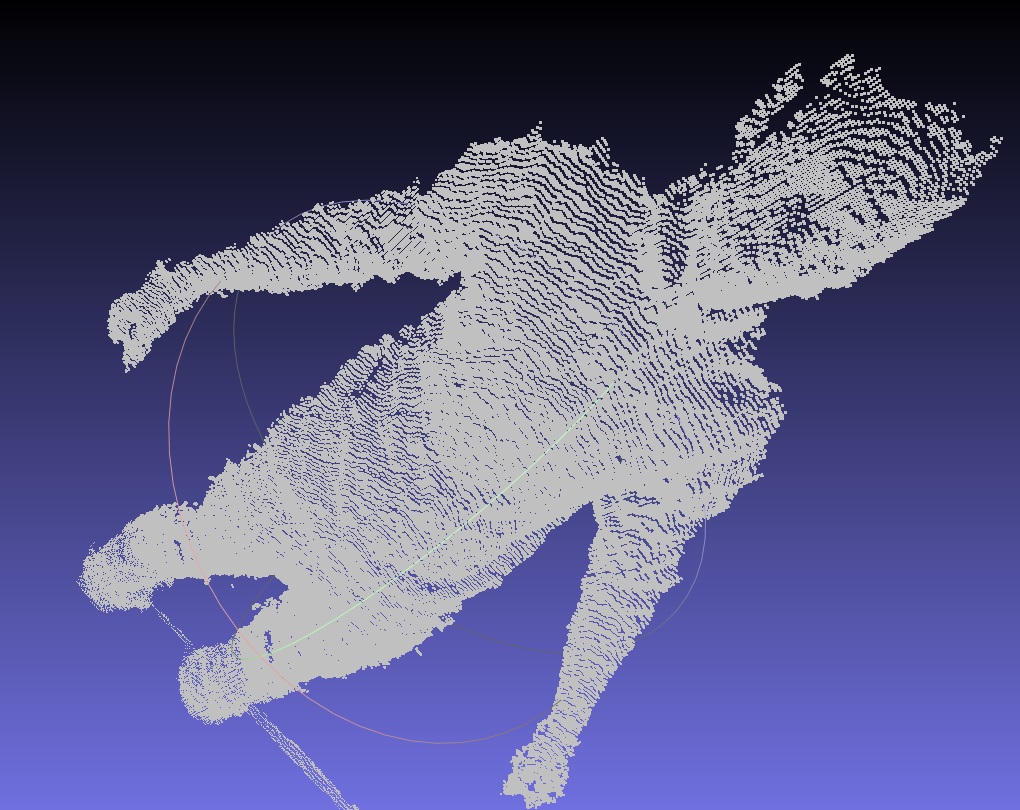
The main goal of the first part of the project was to perform an Iterative Closest Point registration on two depth maps obtained using the Kinect depth sensor in C++ on the windows platform. The other purposes of this first part was to learn how to integrate alone big libraries (dynamic or not) to the project and to handle with the difficulties of implementing an algorithm on the different classes of the libraries whom do not match necessarily one with the other. The second part of the project was to bond, two by two with the precedent algorithm, different scan frames get by the Kinect with the help of its motor to get a whole body depth image.
Please, see project report.
Please, see final presentation.
Please, see project code.
Please, see project data set.
Please, see project papers.
Please, see project demo.