






Projects Last Projects
B-Glove 3D
Tal Leibovitz, Aviel Simchi
Supervised by Yaron Honen and Boris Van-Sosin
As the development and usage of VR and AR technologies increased in the last years there isn’t yet a
cheap and precise solution for finger-tracking problem.
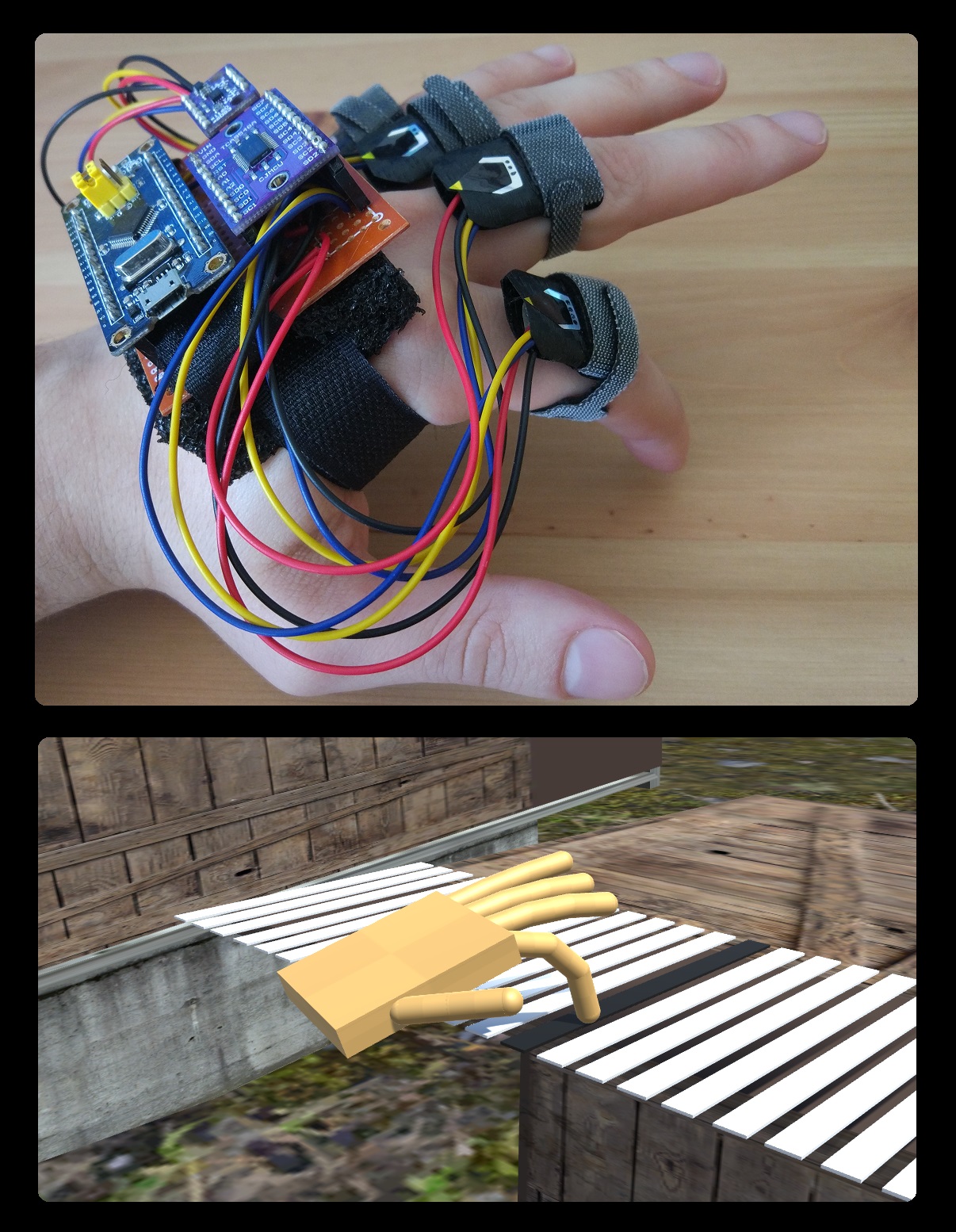
This follow-up project designed to continue the work we have done as members of the B-Glove
hardware and software teams. In our main project, we looked for creating a solution for the finger-
tracking problem using IMUs (Inertial Measurement Unit) located on the fingers and the back of the
hand.
With the help of IMUs, we were able to determine the orientation of each finger and the entire
hand. These orientations are sent to the computer which displays a 3D hand in Unity scene.
Please, see project papers.
Please, see project report.
Please, see final presentation.
Please, see demo clip.