






Projects Last Projects
Reinforcement Learning Approach for Formula Driverless Car
Elior Kanfi
Supervised by Yaron Honen, Roman Rabinovitch
Formula Student Driverless is a competition between universities all over the world to build an autonomous race car that will drive successfully in a racetrack, with events and competitions happening all throughout the year in many cities around the world.
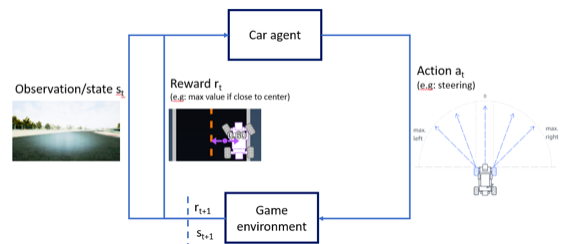
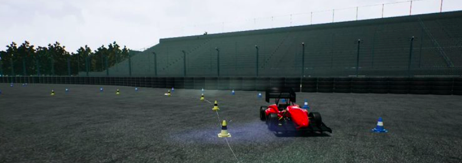
In this project I implemented Reinforcement Learning algorithm called SAC (Soft Actor Critic) on the simulated Technion autonomous Formula car, with simulation done in Unreal Engine 4 and AirSim plugin, and input being only an image from a camera mounted on the car, while the car has no knowledge or assumptions on the shape of the track.
I used a VAE (Variational Auto-Encoder) to reduce image size and thus reducing the observation space, and the output of the algorithm is a steering angle, keeping a constant speed of 7.5 m/s (27 km/h).
My work in the GIP Lab in the Technion - Israel Institute of Technology, strives to contribute to the amazing Formula Student Technion Driverless team in their efforts to compete in future events.
My code in GitHub: https://github.com/eliork/Reinforcement-Learning-on-Autonomous-Race-Car

Please, see project report.
Please, see final presentation.
Please, see Code.
Please, see demo clip.