






Projects Last Projects
Stereo Camera
Yaniv Wolf
Supervised by Amit Bracha and Noam Rotstein
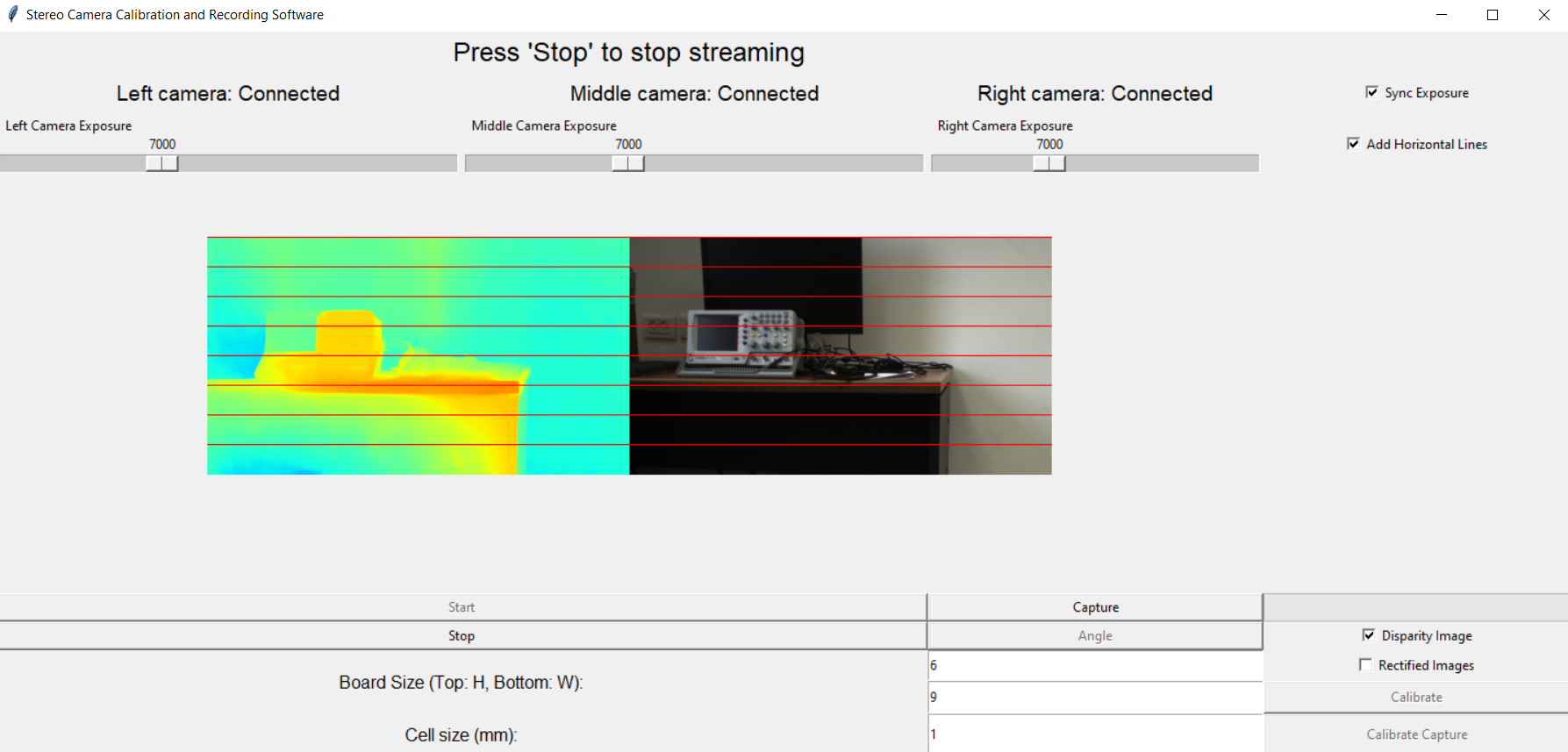
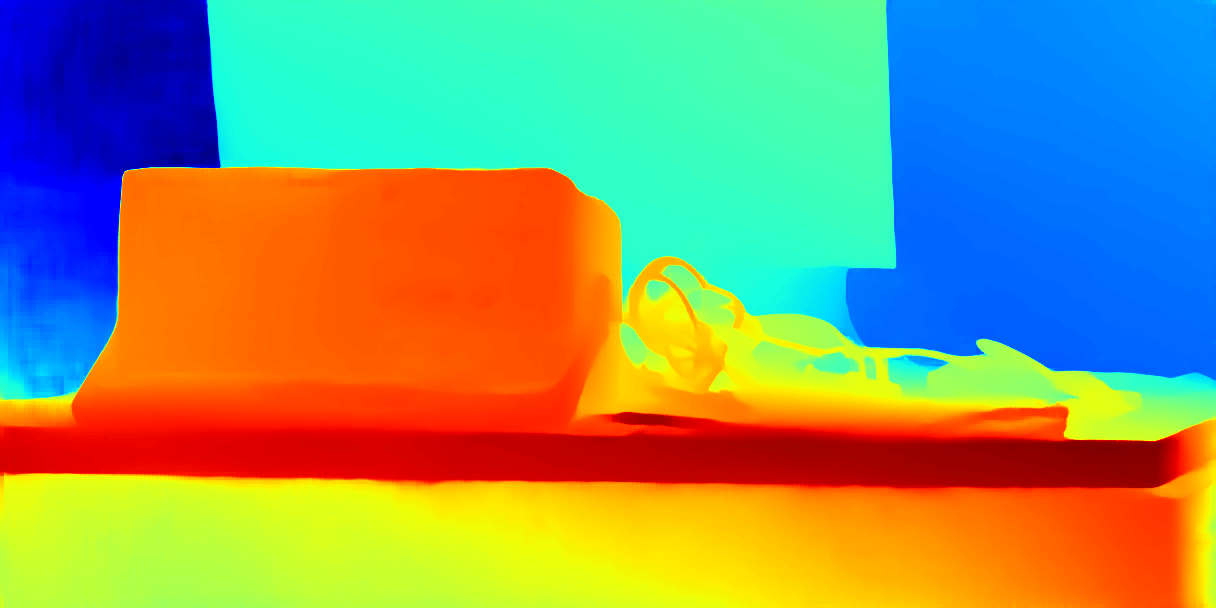
While traditional cameras are constrained to two dimensional images, it is possible to utilize several cameras to create systems capable of capturing three-dimensional images. Such systems are called stereo camera systems, and are capable of capturing the depth of every point in the scene, using a stereo matching algorithm and the distance between the cameras. In this project, I created a stereo camera from scratch, which includes wiring the cameras for synchronized hardware triggering, and building an interface capable of streaming and capturing depth images, generating and viewing point clouds, and interactively performing internal and stereo calibration of the camera array.

Please, see project report.
Please, see final presentation.