






Projects Last Projects
Quad-copter GIP Vision Control Farmework
Nathan Sala and Ofir Zelig
Supervised by David Dovrat , Ohad Menashe and Roman Rabinovich
Abstract
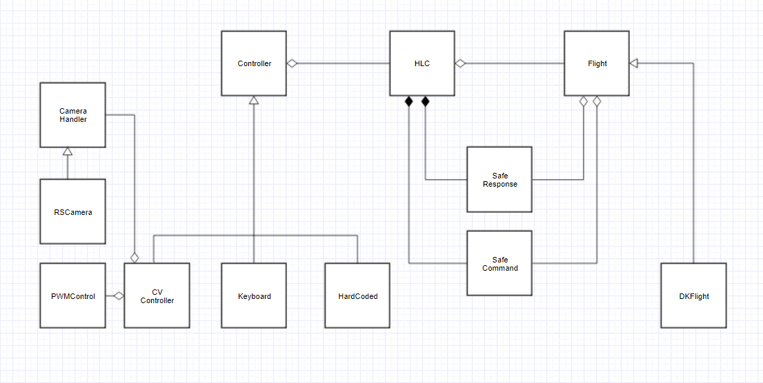
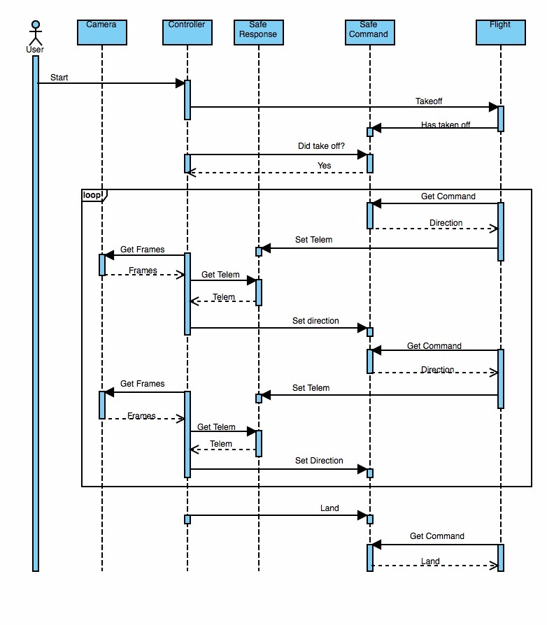
Drones can be used to various tasks and replace humans in many aspects of our lives. Our goal was to create a system that will enable to control a drone using computer vision that will enable it to fly autonomously. Eventually, we created a framework that wraps all the parts that control the flight functionality of the drone in a way that future projects could use it could focus only on computer vision.
Pictures

Project Report
Please, see project report.
Final Presentation
Please, see final presentation.