






Projects Last Projects
Robotic vision
Snir Green Eitan Baron
Supervised by Amit Bracha
Abstract
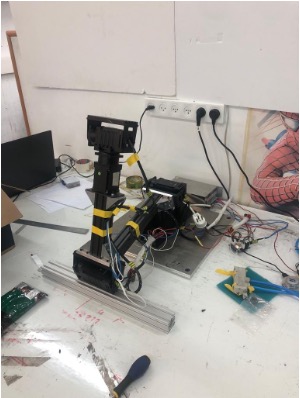
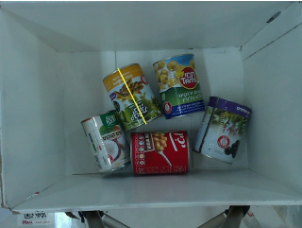
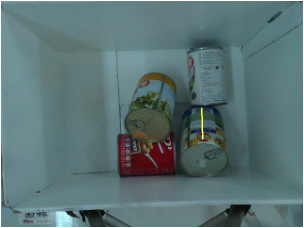
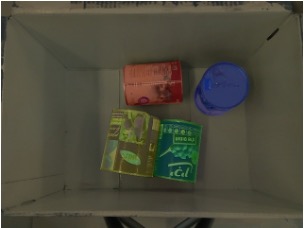
The Robotics Excellence Program in mechanical engineering department are trying to build a robotic arm that picks tin cans (as the picture on the right) from a clutter in a box and organize it for shipment.
Above the box there is a static RGBD LIDAR camera.
Our project was creating the “vision†part of the robot, meaning each time the robot wants to take the next can from the clutter – he sends a request to our program that is connected to the static camera that will return the position of the most upper can.
Pictures

Project Report
Please, see project report.
Final Presentation
Please, see final presentation.
Data Set
Please, see data set.